摘要
本文提出了一种快速的基于区域的卷积网络方法(fast R-CNN)用于目标检测。Fast R-CNN建立在以前使用的深卷积网络有效地分类目标的成果上。相比于之前的成果,Fast R-CNN采用了多项创新提高训练和测试速度来提高检测精度。Fast R-CNN训练非常深的VGG16网络比R-CNN快9倍,测试时间快213倍,并在PASCAL VOC上得到更高的精度。与SPPnet相比,fast R-CNN训练VGG16网络比他快3倍,测试速度快10倍,并且更准确。Fast R-CNN的Python和C ++(使用Caffe)实现以MIT开源许可证发布在:https://github.com/rbgirshick/fast-rcnn。
简介
最近,深度卷积网络1 2已经显著提高了图像分类1和目标检测3 4的准确性。与图像分类相比,目标检测是一个更具挑战性的任务,需要更复杂的方法来解决。由于这种复杂性,当前的方法(例如,3 5 4 6)采用多级流水线的方式训练模型,既慢且精度不高。
复杂性的产生是因为检测需要目标的精确定位,这就导致两个主要的难点。首先,必须处理大量候选目标位置(通常称为“提案”)。 第二,这些候选框仅提供粗略定位,其必须被精细化以实现精确定位。 这些问题的解决方案经常会影响速度,准确性或简单性。
在本文中,我们简化了最先进的基于卷积网络的目标检测器的训练过程3 5。我们提出一个单阶段训练算法,联合学习候选框分类和修正他们的空间位置。
所得到的方法用来训练非常深的检测网络(例如VGG16) 比R-CNN快9倍,比SPPnet快3倍。在运行时,检测网络在PASCAL VOC 2012数据集上实现最高准确度,其中mAP为66%(R-CNN为62%),每张图像处理时间为0.3秒,不包括候选框的生成(所有的时间都是使用一个超频到875MHz的Nvidia K40 GPU测试的)。
R-CNN与SPPnet
基于区域的卷积网络方法(RCNN)通过使用深度卷积网络来分类目标候选框,获得了很高的目标检测精度。然而,R-CNN具有显着的缺点:
- 训练过程是多级流水线。R-CNN首先使用目标候选框对卷积神经网络使用log损失进行微调。然后,它将卷积神经网络得到的特征送入SVM。 这些SVM作为目标检测器,替代通过微调学习的softmax分类器。 在第三个训练阶段,学习检测框回归。
- 训练在时间和空间上是的开销很大。对于SVM和检测框回归训练,从每个图像中的每个目标候选框提取特征,并写入磁盘。对于非常深的网络,如VGG16,这个过程在单个GPU上需要2.5天(VOC07 trainval上的5k个图像)。这些特征需要数百GB的存储空间。
- 目标检测速度很慢。在测试时,从每个测试图像中的每个目标候选框提取特征。用VGG16网络检测目标每个图像需要47秒(在GPU上)。
R-CNN很慢是因为它为每个目标候选框进行卷积神经网络正向传递,而不共享计算。SPPnet5通过共享计算加速R-CNN。SPPnet5计算整个输入图像的卷积特征图,然后使用从共享特征图提取的特征向量来对每个候选框进行分类。通过最大池化将候选框内的特征图转化为固定大小的输出(例如,6X6)来提取针对候选框的特征。多个输出被池化,然后连接成空间金字塔池7。SPPnet在测试时将R-CNN加速10到100倍。由于更快的候选框特征提取训练时间也减少3倍。
SPP网络也有显著的缺点。像R-CNN一样,训练过程是一个多级流水线,涉及提取特征,使用log损失对网络进行微调,训练SVM分类器,最后拟合检测框回归。特征也写入磁盘。但与R-CNN不同,在5中提出的微调算法不能更新在空间金字塔池之前的卷积层。不出所料,这种限制(固定的卷积层)限制了深层网络的精度。
贡献
我们提出一种新的训练算法,修正R-CNN和SPPnet的缺点,同时提高其速度和准确性。因为它能比较快地进行训练和测试,我们称之为Fast R-CNN。Fast RCNN方法有以下几个优点:
- 比R-CNN和SPPnet具有更高的目标检测精度(mAP)。
- 训练是使用多任务损失的单阶段训练。
- 训练可以更新所有网络层参数。
- 不需要磁盘空间缓存特征。
Fast R-CNN使用Python和C++(Caffe8)语言编写,以MIT开源许可证发布在:https://github.com/rbgirshick/fast-rcnn。
Fast R-CNN架构与训练
Fast R-CNN的架构如下图(图1)所示:
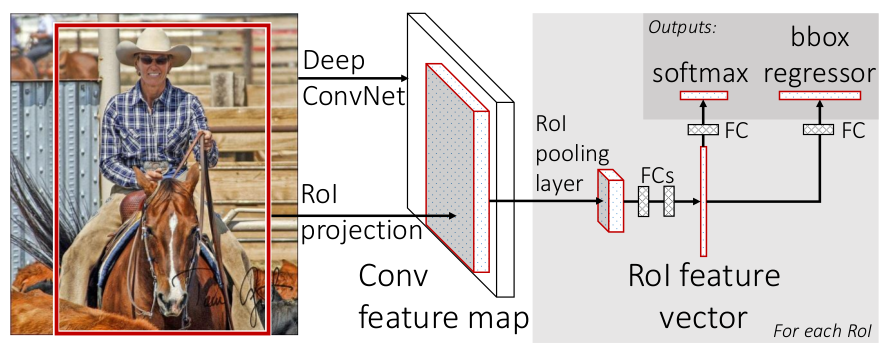
图1. Fast R-CNN架构。输入图像和多个感兴趣区域(RoI)被输入到全卷积网络中。每个RoI被池化到固定大小的特征图中,然后通过全连接层(FC)映射到特征向量。网络对于每个RoI具有两个输出向量:Softmax概率和每类检测框回归偏移量。该架构是使用多任务丢失端到端训练的。
Fast R-CNN网络将整个图像和一组候选框作为输入。网络首先使用几个卷积层(conv)和最大池化层来处理整个图像,以产生卷积特征图。然后,对于每个候选框,RoI池化层从特征图中提取固定长度的特征向量。每个特征向量被送入一系列全连接(fc)层中,其最终分支成两个同级输出层 :一个输出$K$个类别加上1个背景类别的Softmax概率估计,另一个为$K$个类别的每一个类别输出四个实数值。每组4个值表示$K$个类别的一个类别的检测框位置的修正。
RoI池化层
RoI池化层使用最大池化将任何有效的RoI内的特征转换成具有$H \times W$(例如,$7 \times 7$)的固定空间范围的小特征图,其中$H$和$W$是层的超参数,独立于任何特定的RoI。在本文中,RoI是卷积特征图中的一个矩形窗口。 每个RoI由指定其左上角$(r, c)$及其高度和宽度$(h, w)$的四元组$(r, c, h, w)$定义。
RoI最大池化通过将大小为$h \times w$的RoI窗口分割成$H \times W$个网格,子窗口大小约为$h/H \times w/W$,然后对每个子窗口执行最大池化,并将输出合并到相应的输出网格单元中。同标准的最大池化一样,池化操作独立应用于每个特征图通道。RoI层只是SPPnets 5中使用的空间金字塔池层的特殊情况,其只有一个金字塔层。 我们使用5中给出的池化子窗口计算方法。
从预训练网络初始化
我们实验了三个预训练的ImageNet9网络,每个网络有五个最大池化层和五到十三个卷积层(网络详细信息,请参见实验配置)。当预训练网络初始化fast R-CNN网络时,其经历三个变换。
首先,最后的最大池化层由RoI池层代替,其将H和W设置为与网络的第一个全连接层兼容的配置(例如,对于VGG16,$H = W = 7$)。
然后,网络的最后一格全连接层和Softmax(其被训练用于1000类ImageNet分类)被替换为前面描述的两个同级层(全连接层和$K + 1$个类别的Softmax以及类别特定的检测框回归)。
最后,网络被修改为采用两个数据输入:图像的列表和这些图像中的RoI的列表。
微调
用反向传播训练所有网络权重是Fast R-CNN的重要能力。首先,让我们阐明为什么SPPnet无法更新低于空间金字塔池化层的权重。
根本原因是当每个训练样本(即RoI)来自不同的图像时,通过SPP层的反向传播是非常低效的,这正是训练R-CNN和SPPnet网络的方法。低效的部分是因为每个RoI可能具有非常大的感受野,通常跨越整个输入图像。由于正向传播必须处理整个感受野,训练输入很大(通常是整个图像)。
我们提出了一种更有效的训练方法,利用训练期间的特征共享。在Fast RCNN网络训练中,随机梯度下降(SGD)的小批量是被分层采样的,首先采样$N$个图像,然后从每个图像采样$R/N$个 RoI。关键的是,来自同一图像的RoI在向前和向后传播中共享计算和内存。减小$N$,就减少了小批量的计算。例如,当$N = 2$和$R = 128$时,得到的训练方案比从128幅不同的图采样一个RoI(即R-CNN和SPPnet的策略)快64倍。
这个策略的一个令人担心的问题是它可能导致训练收敛变慢,因为来自相同图像的RoI是相关的。这个问题似乎在实际情况下并不存在,当$N = 2$和$R = 128$时,我们使用比R-CNN更少的SGD迭代就获得了良好的结果。
除了分层采样,Fast R-CNN使用了一个精细的训练过程,在微调阶段联合优化Softmax分类器和检测框回归,而不是分别在三个独立的阶段训练softmax分类器,SVM和回归器3 [^ 11]。 下面将详细描述该过程(损失,小批量采样策略,通过RoI池化层的反向传播和SGD超参数)。
多任务损失。Fast R-CNN网络具有两个同级输出层。 第一个输出在$K + 1$个类别上的离散概率分布(每个RoI),$p =(p_0,…,p_K)$。 通常,通过全连接层的$K + 1$个输出上的Softmax来计算$p$。第二个输出层输出检测框回归偏移,$t^k = (t^k_x, t^k_y, t^k_w, t^k_h)$,对于由k索引的K个类别中的每一个。 我们使用3中给出的$t^k$的参数化,其中$t^k$指定相对于候选框的尺度不变转换和对数空间高度/宽度移位。
每个训练的RoI用类真值$u$和检测框回归目标真值$v$标记。我们对每个标记的RoI使用多任务损失$L$以联合训练分类和检测框回归: \(L(p, u, t^u, v) = L_{cls}(p, u) + \lambda \lbrack u \ge 1 \rbrack L_{loc}(t^u, v) \tag{1}\)
其中$L_{cls}(p, u) = -\log p_u$, 是类真值$u$的log损失。
对于类真值$u$,第二个损失$L_{loc}$是定义在检测框回归目标真值元组$u, v = (v_x, v_y, v_w, v_h)$和预测元组$t^u = (t^u_x, t^u_y, t^u_w, t^u_h)$上的损失。 Iverson括号指示函数$\lbrack u \ge 1 \rbrack$当$u \ge 1$的时候为值1,否则为0。按照惯例,背景类标记为$u = 0$。对于背景RoI,没有检测框真值的概念,因此$L_{loc}$被忽略。对于检测框回归,我们使用损失 \(L_{loc}(t^u, v) = \sum_{i \in \lbrace x, y, w, h \rbrace}smooth_{L_1}(t^u_i - v_i) \tag{2}\) 其中: \(smooth_{L_1}(x) = \left\{\begin{matrix} 0.5x^2 & if \vert x \vert \lt 1\\ \vert x \vert - 0.5 & otherwise \end{matrix}\right. \tag{3}\) 是鲁棒的$L_1$损失,对于异常值比在R-CNN和SPPnet中使用的$L_2$损失更不敏感。当回归目标无界时,具有$L_2$损失的训练可能需要仔细调整学习速率,以防止爆炸梯度。公式$(3)$消除了这种灵敏度。
公式$(1)$中的超参数$\lambda$控制两个任务损失之间的平衡。我们将回归目标真值$v_i$归一化为具有零均值和单位方差。所有实验都使用$\lambda = 1$。
我们注意到10使用相关损失来训练一个类别无关的目标候选网络。 与我们的方法不同的是10倡导一个分离定位和分类的双网络系统。OverFeat4,R-CNN3和SPPnet5也训练分类器和检测框定位器,但是这些方法使用逐级训练,这对于Fast RCNN来说不是最好的选择。
小批量采样。在微调期间,每个SGD的小批量由$N = 2$个图像构成,均匀地随机选择(如通常的做法,我们实际上迭代数据集的排列)。 我们使用大小为$R = 128$的小批量,从每个图像采样64个RoI。 如在3中,我们从候选框中获取25%的RoI,这些候选框与检测框真值的IoU至少为0.5。 这些RoI只包括用前景对象类标记的样本,即$u \ge 1$。 剩余的RoI从候选框中采样,该候选框与检测框真值的最大IoU在区间$\lbrack 0.1, 0.5)$上5。 这些是背景样本,并用$u = 0$标记。0.1的阈值下限似乎充当难负样本重训练的启发式算法11。 在训练期间,图像以概率0.5水平翻转。不使用其他数据增强。
通过RoI池化层的反向传播。反向传播通过RoI池化层。为了清楚起见,我们假设每个小批量($N = 1$)只有一个图像,扩展到$N > 1$是显而易见的,因为前向传播独立地处理所有图像。
令$x_i \in \mathbb{R}$是到RoI池化层的第$i$个激活输入,并且令$y_{rj}$是来自第$r$个RoI层的第$j$个输出。RoI池化层计算$y_{rj} = x_{i \ast(r, j)}$,其中$x_{i \ast(r, j)} = argmax_{i’ \in \mathcal{R}(r, j)}x_{i’}$。$\mathcal{R}(r, j)$是输出单元$y_{rj}$最大池化的子窗口中的输入的索引集合。单个$x_i$可以被分配给几个不同的输出$y_{rj}$。
RoI池化层反向传播函数通过遵循argmax switches来计算关于每个输入变量$x_i$的损失函数的偏导数: \(\frac{\partial L}{\partial x_i} = \sum_r \sum_j \lbrack i = i^{\ast}(r, j) \rbrack \frac{\partial L}{\partial y_{rj}} \tag{4}\) 换句话说,对于每个小批量RoI $r$和对于每个池化输出单元$y_{rj}$,如果$i$是$y_{rj}$通过最大池化选择的argmax,则将这个偏导数$\frac{\partial L}{\partial y_{rj}}$积累下来。在反向传播中,偏导数$\frac{\partial L}{\partial y_{rj}}$已经由RoI池化层顶部的层的反向传播函数计算。
SGD超参数。用于Softmax分类和检测框回归的全连接层的权重分别使用具有方差0.01和0.001的零均值高斯分布初始化。偏置初始化为0。所有层的权重学习率为1倍的全局学习率,偏置为2倍的全局学习率,全局学习率为0.001。 当对VOC07或VOC12 trainval训练时,我们运行SGD进行30k次小批量迭代,然后将学习率降低到0.0001,再训练10k次迭代。当我们训练更大的数据集,我们运行SGD更多的迭代,如下文所述。 使用0.9的动量和0.0005的参数衰减(权重和偏置)。
尺度不变性
我们探索两种实现尺度不变对象检测的方法:(1)通过“brute force”学习和(2)通过使用图像金字塔。 这些策略遵循5中的两种方法。 在“brute force”方法中,在训练和测试期间以预定义的像素大小处理每个图像。网络必须直接从训练数据学习尺度不变性目标检测。
相反,多尺度方法通过图像金字塔向网络提供近似尺度不变性。 在测试时,图像金字塔用于大致缩放-规范化每个候选框。 在多尺度训练期间,我们在每次图像采样时随机采样金字塔尺度,遵循5,作为数据增强的形式。由于GPU内存限制,我们只对较小的网络进行多尺度训练。
Fast R-CNN检测
一旦Fast R-CNN网络被微调完毕,检测相当于运行前向传播(假设候选框是预先计算的)。网络将图像(或图像金字塔,编码为图像列表)和待计算概率的$R$个候选框的列表作为输入。在测试的时候,$R$通常在2000左右,虽然我们将考虑将它变大(约45k)的情况。当使用图像金字塔时,每个RoI被缩放,使其最接近5中的$224^2$个像素。
对于每个测试的RoI $r$,正向传播输出类别后验概率分布$p$和相对于$r$的预测的检测框框偏移集合($K$个类别中的每一个获得其自己的精细检测框预测)。我们使用估计的概率$Pr(class = k \vert r) \triangleq p_k$为每个对象类别$k$分配$r$的检测置信度。然后,我们使用R-CNN算法的设置和对每个类别独立执行非最大抑制3。
使用截断的SVD来进行更快的检测
对于整体图像分类,与卷积层相比,计算全连接层花费的时间较小。相反,为了检测,要处理的RoI的数量很大,并且接近一半的正向传递时间用于计算全连接层(参见图2)。大的全连接层容易通过用截短的SVD压缩来加速12 13。
在这种技术中,层的$u \times v$权重矩阵$W$通过SVD被近似分解为: \(W \thickapprox U\Sigma_tV^T \tag{5}\) 在这种分解中,$U$是一个$u \times t$的矩阵,包括$W$的前$t$个左奇异向量,$\Sigma_t$是$t \times t$对角矩阵,其包含$W$的前$t$个奇异值,并且$V$是$v \times t$矩阵,包括$W$的前$t$个右奇异向量。截断SVD将参数计数从$uv$减少到$t(u + v)$个,如果$t$远小于$min(u, v)$,则SVD可能是重要的。 为了压缩网络,对应于$W$的单个全连接层由两个全连接层替代,在它们之间没有非线性。这些层中的第一层使用权重矩阵$\Sigma_tV^T$(没有偏置),并且第二层使用$U$(其中原始偏差与$W$相关联)。当RoI的数量大时,这种简单的压缩方法给出良好的加速。
主要结果
三个主要结果支持本文的贡献:
- VOC07,2010和2012的最高的mAP。
- 相比R-CNN,SPPnet,快速训练和测试。
- 在VGG16中微调卷积层改善了mAP。
实验配置
我们的实验使用了三个经过预训练的ImageNet网络模型,这些模型可以在线获得(https://github.com/BVLC/caffe/wiki/Model-Zoo)。第一个是来自R-CNN3的CaffeNet(实质上是AlexNet1)。 我们将这个CaffeNet称为模型S,即小模型。第二网络是来自14的VGG_CNN_M_1024,其具有与S相同的深度,但是更宽。 我们把这个网络模型称为M,即中等模型。最后一个网络是来自15的非常深的VGG16模型。由于这个模型是最大的,我们称之为L。在本节中,所有实验都使用单尺度训练和测试($s = 600$,详见尺度不变性:暴力或精细?)。
VOC 2010和2012数据集结果

表2. VOC 2010测试检测平均精度(%)。 BabyLearning使用基于16的网络。 所有其他方法使用VGG16。训练集:12:VOC12 trainval,Prop.:专有数据集,12+seg:12具有分段注释,07++12:VOC07 trainval,VOC07测试和VOC12 trainval的联合。

表3. VOC 2012测试检测平均精度(%)。 BabyLearning和NUS_NIN_c2000使用基于16的网络。 所有其他方法使用VGG16。训练设置:见表2,Unk.:未知。
如上表(表2,表3)所示,在这些数据集上,我们比较Fast R-CNN(简称FRCN)和公共排行榜中comp4(外部数据)上的主流方法(http://host.robots.ox.ac.uk:8080/leaderboard ,访问时间是2015.4.18)。对于NUS_NIN_c2000和BabyLearning方法,目前没有其架构的确切信息,它们是Network-in-Network的变体16。所有其他方法从相同的预训练VGG16网络初始化。
Fast R-CNN在VOC12上获得最高结果,mAP为65.7%(加上额外数据为68.4%)。它也比其他方法快两个数量级,这些方法都基于比较“慢”的R-CNN网络。在VOC10上,SegDeepM 6获得了比Fast R-CNN更高的mAP(67.2%对比66.1%)。SegDeepM使用VOC12 trainval训练集训练并添加了分割的标注,它被设计为通过使用马尔可夫随机场推理R-CNN检测和来自$O_2P$17的语义分割方法的分割来提高R-CNN精度。Fast R-CNN可以替换SegDeepM中使用的R-CNN,这可以导致更好的结果。当使用放大的07++12训练集(见表2标题)时,Fast R-CNN的mAP增加到68.8%,超过SegDeepM。
VOC 2007数据集上的结果
在VOC07数据集上,我们比较Fast R-CNN与R-CNN和SPPnet的mAP。 所有方法从相同的预训练VGG16网络开始,并使用边界框回归。 VGG16 SPPnet结果由5的作者提供。SPPnet在训练和测试期间使用五个尺度。Fast R-CNN对SPPnet的改进说明,即使Fast R-CNN使用单个尺度训练和测试,卷积层微调在mAP中提供了大的改进(从63.1%到66.9%)。R-CNN的mAP为66.0%。 作为次要点,SPPnet在PASCAL中没有使用被标记为“困难”的样本进行训练。 除去这些样本,Fast R-CNN 的mAP为68.1%。 所有其他实验都使用被标记为“困难”的样本。
训练和测试时间
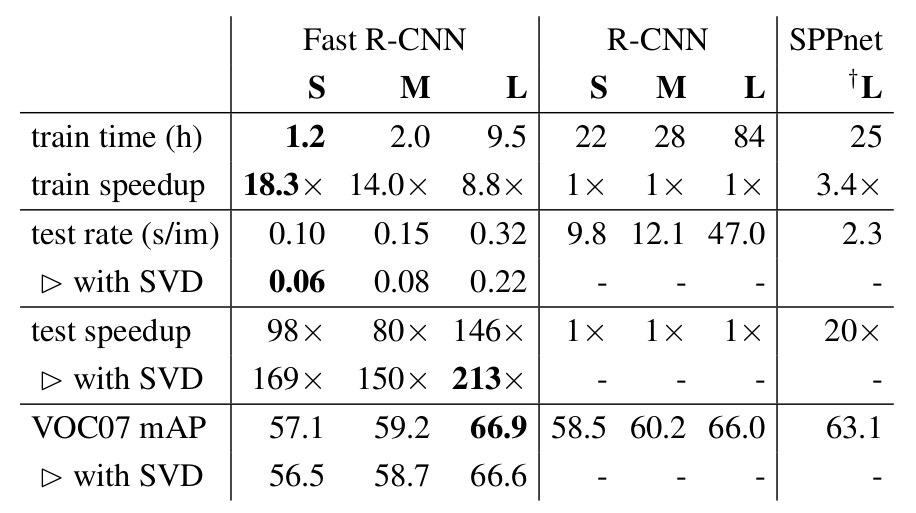
表4. Fast RCNN,R-CNN和SPPnet中相同模型之间的运行时间比较。Fast R-CNN使用单尺度模式。SPPnet使用5中指定的五个尺度,由5的作者提供在Nvidia K40 GPU上的测量时间。
快速的训练和测试是我们的第二个主要成果。表4比较了Fast RCNN,R-CNN和SPPnet之间的训练时间(小时),测试速率(每秒图像数)和VOC07上的mAP。对于VGG16,没有截断SVD的Fast R-CNN处理图像比R-CNN快146倍,有截断SVD的R-CNN快213倍。训练时间减少9倍,从84小时减少到9.5小时。与SPPnet相比,没有截断SVD的Fast RCNN训练VGG16网络比SPPnet快2.7倍(9.5小时对25.5小时),测试时间快7倍,有截断SVD的Fast RCNN比的SPPnet快10倍。 Fast R-CNN还不需要数百GB的磁盘存储,因为它不缓存特征。
截断SVD。截断的SVD可以将检测时间减少30%以上,同时在mAP中只有很小(0.3个百分点)的下降,并且无需在模型压缩后执行额外的微调。
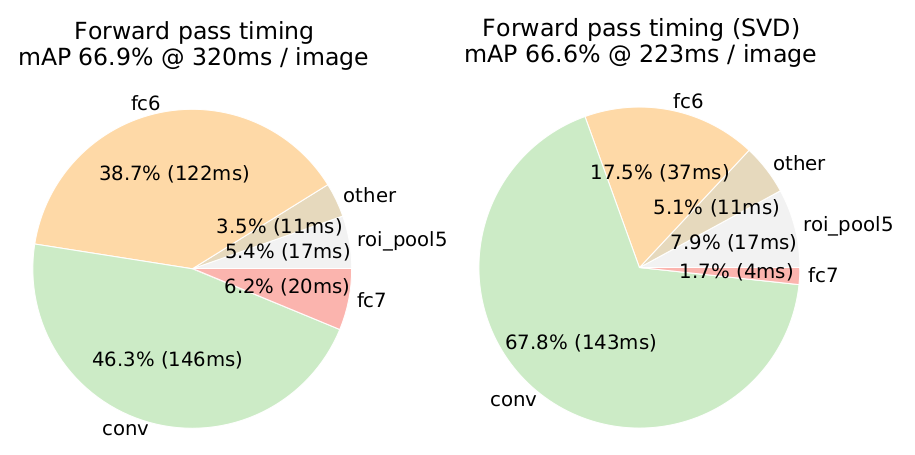
图2. 截断SVD之前和之后VGG16的时间分布。在SVD之前,完全连接的层fc6和fc7需要45%的时间。
图2示出了如何使用来自VGG16的fc6层中的$25088 \times 4096$矩阵的顶部1024个奇异值和来自fc7层的$4096 \times 4096$矩阵的顶部256个奇异值减少运行时间,而在mAP中几乎没有损失。如果在压缩之后再次微调,则可以在mAP中具有更小的下降的情况下进一步加速。
微调哪些层?
对于在SPPnet论文5中考虑的不太深的网络,仅微调全连接层似乎足以获得良好的精度。我们假设这个结果不适用于非常深的网络。为了验证微调卷积层对于VGG16的重要性,我们使用Fast R-CNN微调,但冻结十三个卷积层,以便只有全连接层学习。这种消融模拟单尺度SPPnet训练,将mAP从66.9%降低到61.4%(表5)。这个实验验证了我们的假设:通过RoI池化层的训练对于非常深的网是重要的。
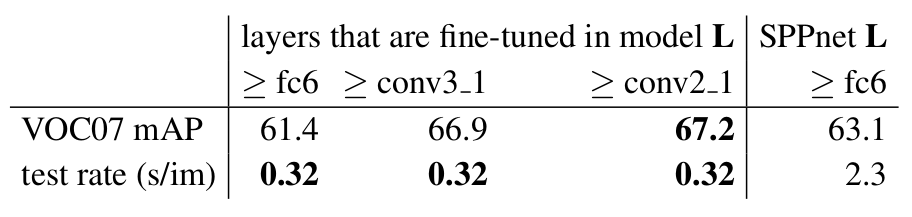
表5. 限制哪些层对VGG16进行微调产生的影响。微调$\ge$fc6模拟单尺度SPPnet训练算法5。 SPPnet L是使用五个尺度,以显著(7倍)的速度成本获得的结果。
这是否意味着所有卷积层应该微调?没有。在较小的网络(S和M)中,我们发现conv1(第一个卷积层)是通用的和任务独立的(一个众所周知的事实1)。允许conv1学习或不学习,对mAP没有很有意义的影响。对于VGG16,我们发现只需要更新conv3_1及以上(13个卷积层中的9个)的层。这种观察是实用的:(1)从conv2_1更新使训练变慢1.3倍(12.5小时对比9.5小时)和(2)从conv1_1更新GPU内存不够用。当从conv2_1学习时mAP仅为增加0.3个点(表5,最后一列)。 所有Fast R-CNN在本文中结果都使用VGG16微调层conv3_1及以上的层,所有实验用模型S和M微调层conv2及以上的层。
设计评估
我们通过实验来了解Fast RCNN与R-CNN和SPPnet的比较,以及评估设计决策。按照最佳实践,我们在PASCAL VOC07数据集上进行了这些实验。
多任务训练有用吗?
多任务训练是方便的,因为它避免管理顺序训练任务的流水线。但它也有可能改善结果,因为任务通过共享的表示(ConvNet)18相互影响。多任务训练能提高Fast R-CNN中的目标检测精度吗?
为了测试这个问题,我们训练仅使用公式$(1)$中的分类损失$L_{cls}$(即设置$\lambda = 0$)的基准网络。这些基线是表6中每组的第一列。请注意,这些模型没有检测框回归。接下来(每组的第二列),是我们采用多任务损失(公式$(1)$,$\lambda = 1$)训练的网络,但是我们在测试时禁用检测框回归。这隔离了网络的分类准确性,并允许与基准网络的apple to apple的比较。
在所有三个网络中,我们观察到多任务训练相对于单独的分类训练提高了纯分类精度。改进范围从+0.8到+1.1 个mAP点,显示了多任务学习的一致的积极效果。
最后,我们采用基线模型(仅使用分类损失进行训练),加上检测回归层,并使用$L_{loc}$训练它们,同时保持所有其他网络参数冻结。每组中的第三列显示了这种逐级训练方案的结果:mAP相对于第一列改进,但逐级训练表现不如多任务训练(每组第四列)。

表6. 多任务训练(每组第四列)改进了分段训练(每组第三列)的mAP。
尺度不变性:暴力或精细?
我们比较两个策略实现尺度不变物体检测:暴力学习(单尺度)和图像金字塔(多尺度)。在任一情况下,我们将图像的尺度$s$定义为其最短边的长度。
所有单尺度实验使用$s = 600$像素,对于一些图像,$s$可以小于600,因为我们保持横纵比缩放图像,并限制其最长边为1000像素。选择这些值使得VGG16在微调期间不至于GPU内存不足。较小的模型占用显存更少,所以可受益于较大的$s$值。然而,每个模型的优化不是我们的主要的关注点。我们注意到PASCAL图像是384×473像素的,因此单尺度设置通常以1.6倍的倍数上采样图像。因此,RoI池化层的平均有效步进为约10像素。
在多尺度设置中,我们使用5中指定的相同的五个尺度($s \in \lbrace 480, 576, 688, 864, 1200 \rbrace$)以方便与SPPnet进行比较。但是,我们以2000像素为上限,以避免GPU内存不足。
表7显示了当使用一个或五个尺度进行训练和测试时的模型S和M的结果。也许在5中最令人惊讶的结果是单尺度检测几乎与多尺度检测一样好。我们的研究结果能证明他们的结果:深度卷积网络擅长直接学习尺度不变性。多尺度方法消耗大量的计算时间仅带来了很小的mAP增加(表7)。在VGG16(模型L)的情况下,我们受限于实施细节仅能使用单个尺度。然而,它得到了66.9%的mAP,略高于R-CNN的66.0%19,尽管R-CNN在每个候选区域被缩放为规范大小,在意义上使用了“无限”尺度。
由于单尺度处理提供速度和精度之间的最佳折衷,特别是对于非常深的模型,本小节以外的所有实验使用单尺度训练和测试,$s = 600$像素。
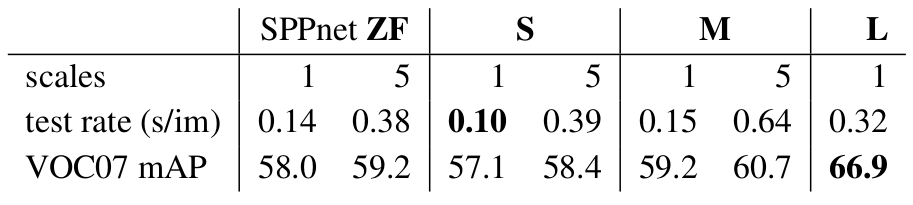
表7. 多尺度与单尺度。SPPnet ZF(类似于模型S)的结果来自5。 具有单尺度的较大网络提供最佳的速度/精度平衡。(L在我们的实现中不能使用多尺度,因为GPU内存限制。)
我们需要更过训练数据吗?
当提供更多的训练数据时,好的目标检测器应该会得到改善。 Zhu等人20发现DPM11mAP在只有几百到千个训练样本的时候就饱和了。在这里我们增加VOC07 trainval训练集与VOC12 trainval训练集,大约增加到三倍的图像,数量达到16.5k,以评估Fast R-CNN。扩大训练集提高了VOC07测试的mAP,从66.9%到70.0%(表1)。 当对这个数据集进行训练时,我们使用60k次小批量迭代而不是40k。

表1. VOC 2007测试检测平均精度(%)。 所有方法都使用VGG16。 训练集:07:VOC07 trainval,07 \diff:07没有“困难”的样本,07 + 12:07和VOC12训练的联合。 SPPnet结果由5的作者提供。
我们对VOC10和2012进行类似的实验,我们用VOC07 trainval,test和VOC12 trainval构造了21.5k图像的数据集。当训练这个数据集时,我们使用100k次SGD迭代和每40k次迭代(而不是每30k次)降低学习率10倍。对于VOC10和2012,mAP分别从66.1%提高到68.8%和从65.7%提高到68.4%。
SVM分类是否优于Softmax?
Fast R-CNN在微调期间使用softmax分类器学习,而不是如在R-CNN和SPPnet中训练线性SVM。为了理解这种选择的影响,我们在Fast R-CNN中实施了具有难负采样重训练的SVM训练。我们使用与R-CNN中相同的训练算法和超参数。
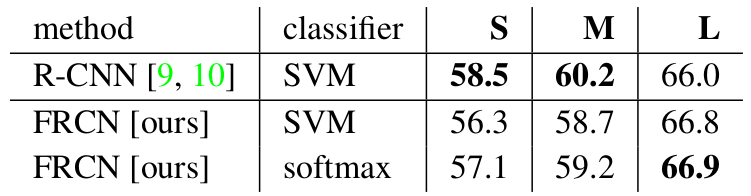
表8. 用Softmax的Fast R-CNN对比用SVM的Fast RCNN(VOC07 mAP)。
对于所有三个网络,Softmax略优于SVM,mAP分别提高了0.1和0.8个点。这种效应很小,但是它表明与先前的多级训练方法相比,“一次性”微调是足够的。我们注意到,Softmax,不像SVM那样,在分类RoI时引入类之间的竞争。
更多的候选区域更好吗?
存在(广义地)两种类型的目标检测器:使用候选区域的稀疏集合(例如,选择性搜索21)和使用密集集合(例如DPM11)。分类稀疏提议是级联的一种类型22,其中提议机制首先拒绝大量候选者,让分类器来评估留下的小集合。当应用于DPM检测时,该级联提高了检测精度21。我们发现提案分类器级联也提高了Fast R-CNN的精度。
使用选择性搜索的质量模式,我们扫描每个图像1k到10k个候选框,每次重新训练和重新测试模型M.如果候选框纯粹扮演计算的角色,增加每个图像的候选框数量不应该损害mAP。
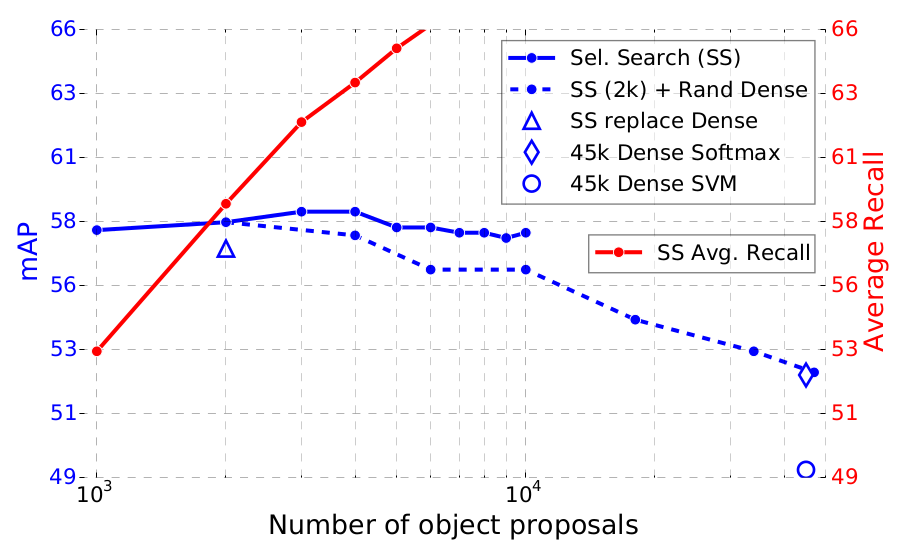
图3. 各种候选区域方案的VOC07测试mAP和AR。
我们发现mAP上升,然后随着候选区域计数增加而略微下降(图3,实线蓝线)。这个实验表明,用更多的候选区域没有帮助,甚至稍微有点伤害准确性。
如果不实际运行实验,这个结果很难预测。用于测量候选区域质量的最先进的技术是平均召回率(AR)23。当对每个图像使用固定数量的候选区域时,AR与使用R-CNN的几种候选区域方法良好地相关。图3示出了AR(实线红线)与mAP不相关,因为每个图像的候选区域数量是变化的。AR必须小心使用,由于更多的候选区域更高的AR并不意味着mAP会增加。幸运的是,使用模型M的训练和测试需要不到2.5小时。因此,Fast R-CNN能够高效地,直接地评估目标候选区域mAP,这优于代理度量。
我们还调查Fast R-CNN当使用密集生成框(在缩放,位置和宽高比上),大约45k个框/图像。这个密集集足够丰富,当每个选择性搜索框被其最近(IoU)密集框替换时,mAP只降低1个点(到57.7%,图3,蓝色三角形)。
密集框的统计数据与选择性搜索框的统计数据不同。从2k个选择性搜索框开始,我们在添加$1000 \times \lbrace 2, 4, 6, 8, 10, 32, 45 \rbrace$的随机样本密集框时测试mAP。对于每个实验,我们重新训练和重新测试模型M。当添加这些密集框时,mAP比添加更多选择性搜索框时下降得更强,最终达到53.0%。
我们还训练和测试Fast R-CNN只使用密集框(45k/图像)。此设置的mAP为52.9%(蓝色菱形)。最后,我们检查是否需要使用难样本重训练的SVM来处理密集框分布。 SVM做得更糟:49.3%(蓝色圆圈)。
MS COCO初步结果
我们将fast R-CNN(使用VGG16)应用于MS COCO数据集24,以建立初步基线。我们对80k图像训练集进行了240k次迭代训练,并使用评估服务器对“test-dev”集进行评估。 PASCAL标准下的mAP为35.9%;。新的COCO标准下的AP(也平均)为19.7%。
结论
本文提出Fast R-CNN,一个对R-CNN和SPPnet干净,快速的更新。 除了报告目前的检测结果之外,我们还提供了详细的实验,希望提供新的见解。 特别值得注意的是,稀疏目标候选区域似乎提高了检测器的质量。 过去探索这个问题过于昂贵(在时间上),但Fast R-CNN使其变得可能。当然,可能存在允许密集盒执行以及稀疏候选框的尚未发现的技术。这样的方法如果被开发,可以帮助进一步加速目标检测。
致谢:感谢Kaiming He,Larry Zitnick和Piotr Dollár的帮助和鼓励。
参考文献:
-
A. Krizhevsky, I. Sutskever, and G. Hinton. ImageNet classification with deep convolutional neural networks. In NIPS, 2012. ↩ ↩2 ↩3 ↩4
-
Y. LeCun, B. Boser, J. Denker, D. Henderson, R. Howard, W. Hubbard, and L. Jackel. Backpropagation applied to handwritten zip code recognition. Neural Comp., 1989. ↩
-
R. Girshick, J. Donahue, T. Darrell, and J. Malik. Rich feature hierarchies for accurate object detection and semantic segmentation. In CVPR, 2014. ↩ ↩2 ↩3 ↩4 ↩5 ↩6 ↩7 ↩8 ↩9
-
P. Sermanet, D. Eigen, X. Zhang, M. Mathieu, R. Fergus, and Y. LeCun. OverFeat: Integrated Recognition, Localization and Detection using Convolutional Networks. In ICLR, 2014. ↩ ↩2 ↩3
-
K. He, X. Zhang, S. Ren, and J. Sun. Spatial pyramid pooling in deep convolutional networks for visual recognition. In ECCV, 2014. ↩ ↩2 ↩3 ↩4 ↩5 ↩6 ↩7 ↩8 ↩9 ↩10 ↩11 ↩12 ↩13 ↩14 ↩15 ↩16 ↩17 ↩18 ↩19 ↩20 ↩21
-
Y. Zhu, R. Urtasun, R. Salakhutdinov, and S. Fidler. segDeepM: Exploiting segmentation and context in deep neural networks for object detection. In CVPR, 2015. ↩ ↩2
-
S. Lazebnik, C. Schmid, and J. Ponce. Beyond bags of features: Spatial pyramid matching for recognizing natural scene categories. In CVPR, 2006. ↩
-
Y. Jia, E. Shelhamer, J. Donahue, S. Karayev, J. Long, R. Girshick, S. Guadarrama, and T. Darrell. Caffe: Convolutional architecture for fast feature embedding. In Proc. of the ACM International Conf. on Multimedia, 2014. ↩
-
J. Deng, W. Dong, R. Socher, L.-J. Li, K. Li, and L. FeiFei. ImageNet: A large-scale hierarchical image database. In CVPR, 2009. ↩
-
D. Erhan, C. Szegedy, A. Toshev, and D. Anguelov. Scalable object detection using deep neural networks. In CVPR, 2014. ↩ ↩2
-
P. Felzenszwalb, R. Girshick, D. McAllester, and D. Ramanan. Object detection with discriminatively trained part based models. TPAMI, 2010. ↩ ↩2 ↩3
-
E. Denton, W. Zaremba, J. Bruna, Y. LeCun, and R. Fergus. Exploiting linear structure within convolutional networks for efficient evaluation. In NIPS, 2014. ↩
-
J. Xue, J. Li, and Y. Gong. Restructuring of deep neural network acoustic models with singular value decomposition. In Interspeech, 2013. ↩
-
K. Chatfield, K. Simonyan, A. Vedaldi, and A. Zisserman. Return of the devil in the details: Delving deep into convolutional nets. In BMVC, 2014. ↩
-
K. Simonyan and A. Zisserman. Very deep convolutional networks for large-scale image recognition. In ICLR, 2015. ↩
-
M. Lin, Q. Chen, and S. Yan. Network in network. In ICLR, 2014. ↩ ↩2 ↩3
-
J. Carreira, R. Caseiro, J. Batista, and C. Sminchisescu. Semantic segmentation with second-order pooling. In ECCV, 2012. ↩
-
R. Caruana. Multitask learning. Machine learning, 28(1), 1997. ↩
-
R. Girshick, J. Donahue, T. Darrell, and J. Malik. Region-based convolutional networks for accurate object detection and segmentation. TPAMI, 2015. ↩
-
X. Zhu, C. Vondrick, D. Ramanan, and C. Fowlkes. Do we need more training data or better models for object detection? In BMVC, 2012. ↩
-
J. Uijlings, K. van de Sande, T. Gevers, and A. Smeulders. Selective search for object recognition. IJCV, 2013. ↩ ↩2
-
P. Viola and M. Jones. Rapid object detection using a boosted cascade of simple features. In CVPR, 2001. ↩
-
J. H. Hosang, R. Benenson, P. Dollár, and B. Schiele. What makes for effective detection proposals? arXiv preprint arXiv:1502.05082, 2015. ↩
-
T. Lin, M. Maire, S. Belongie, L. Bourdev, R. Girshick, J. Hays, P. Perona, D. Ramanan, P. Dollár, and C. L. Zitnick. Microsoft COCO: common objects in context. arXiv e-prints, arXiv:1405.0312 [cs.CV], 2014. ↩